











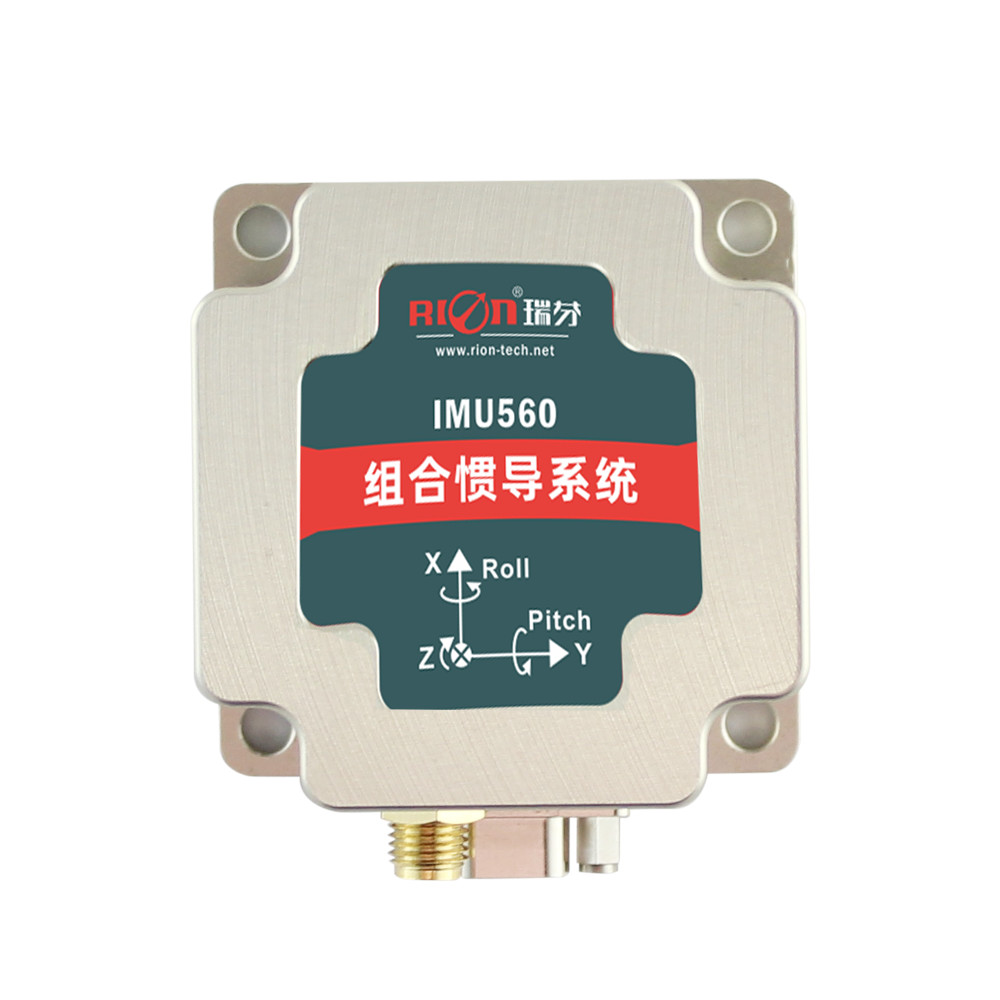



Selon l'ordre de rotation de Z-Y-X, quand la direction positive de l'axe des abscisses est dirigée vers l'avant du transporteur, l'angle de la rotation autour de l'axe des z est l'angle se dirigeant, l'angle de la rotation autour de l'axe des y est l'angle de lancement, et l'angle de la rotation autour de l'axe des abscisses est l'angle de petit pain.
