Capteur dynamique de boussole du coût bas 3D Digital, 0.8° dirigeant l'exactitude
DDM350B&DDM360B 3D DYNAMIQUE DE GRANDE PRÉCISION C NUMÉRIQUE…
▶DESCRIPTION DE PRODUIT
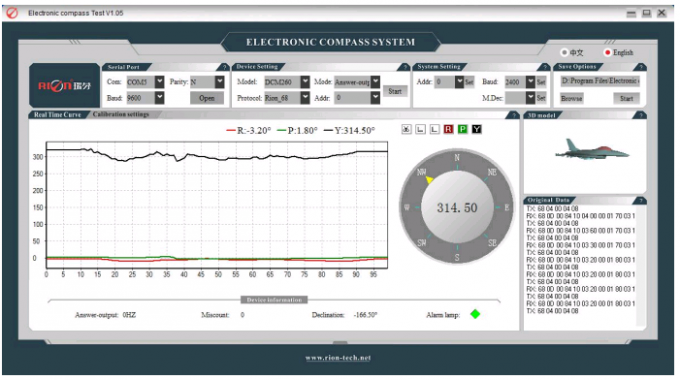
DDM350B/DDM360B est une boussole électronique dynamique tridimensionnelle, qui intègre une unité de mesure à inertie de 9 axes, y compris un accéléromètre gyroscopique, un gyroscope gyroscopique, et une vanne de flux gyroscopique. Utilisant les caractéristiques dynamiques élevées d'angle du gyroscope et les caractéristiques fortement stables d'attitude de l'accéléromètre, le lancement et les angles de petit pain qui suivent les changements complexes d'attitude sont obtenus par l'algorithme dynamique de navigation inertielle. L'angle géomagnétique d'azimut adopte dur des algorithmes magnétiques magnétiques et doux de calibrage, de sorte que la boussole puisse éliminer l'influence du champ magnétique par l'algorithme de calibrage même dans l'environnement avec l'interférence de champ magnétique. Le titre est calculé en temps réel par l'unité centrale de traitement, et les angles dynamiques de lancement et de petit pain sont employés pour la compensation se dirigeante dynamique pour un large éventail d'azimuts magnétiques, s'assurant que la boussole peut fournir des données se dirigeantes à haute précision même aux angles d'inclinaison de jusqu'à ±85°. La boussole électronique intègre un processeur d'arithmétique de haut niveau de DSP avec des modes sortie diversifiés. Les interfaces standard incluent RS232/RS485/TTL et d'autres interfaces, et d'autres interfaces de communication peuvent être adaptées aux besoins du client.
DDM350B/DDM360B est petite et puissance faible consumpting. Elle peut être employée dans les navires, les antennes et des satellites marins, bourdons commerciaux, et beaucoup l'autre haut-vibration, environnements extrêmement durs. Il est plus approprié à la diverse mesure à haute précision d'aujourd'hui a intégré des systèmes de contrôle.
▶CARACTÉRISTIQUES PRINCIPALES
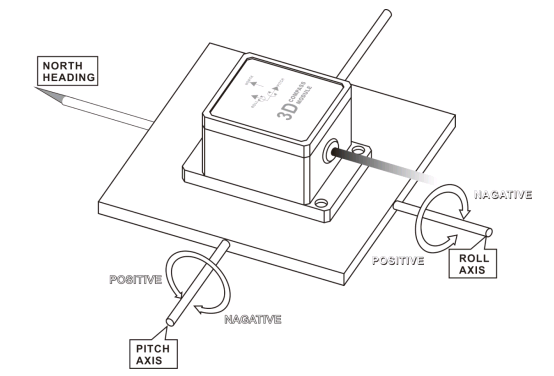
Gamme de mesure d'angle d'inclination de ★ : lancement ±85°, angle ±180° de petit pain
★ avec la compensation magnétique et molle dure magnétique et d'inclinaison d'angle
Interface standard de sortie du ★ RS232/RS485/TTL
Le ★ orientent l'exactitude d'angle : 0.8°
Résolution d'inclination de ★ : 0.1°
Exactitude d'inclination de ★ : 0.2°
Temp large de ★. gamme : -40℃~+85℃
★ Dimesion : L55×W37×H24mm
Alimentation d'énergie de C.C 5V de ★
Estimation imperméable du ★ IP67
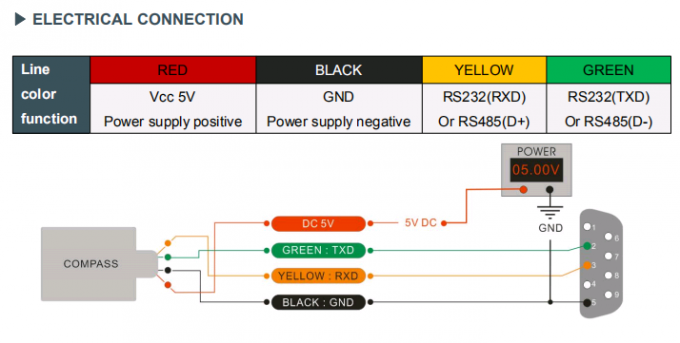
Caractéristiques électriques
| Titre de boussole | Diriger l'exactitude | 0.8° |
| Résolution | 0.1° | |
| Chaîne de lancement | ±90° | |
| Chaîne de petit pain | ±180° | |
| Exactitude d'inclination | État statique 0.2° | |
| 0.5° dynamique | ||
| Résolution | 0.1° | |
| Inclinez la gamme d'angle de compensation | Petit pain ±180° | |
| Lancement <85° | ||
| Calibrage | Calibrage dur de fer | oui |
| Calibrage de fer mou | oui | |
| Méthode de calibrage d'interférence de champ magnétique | Une rotation de l'avion (calibrage bidimensionnel) | |
| Caractéristique physique | Taille | Taille de Shell : L55×W37×H24mm |
| Taille de PCBA : L33×W27×H9mm | ||
|
RS232/RS485/TTL Ligne de connexion d'interface |
Shell : Avance directe de 4PIN 1m | |
| Simple-conseil : 4 fil terminal de la borne 30cm | ||
| Interface | Retard de démarrage | <50ms> |
| Taux de sortie | 20Hz/s | |
| Vitesse baud | 2400 à 115200baud | |
| Format de sortie | Protocole binaire de haute performance | |
| Puissance | Tension d'alimentation | (Défaut) C.C +5V |
| C.C (adapté aux besoins du client) 9~36V | ||
| Actuel (max) | 45mA | |
| Modèle idéal | 35mA | |
| Mode de sommeil | TBD | |
| Environnement | Plage de fonctionnement | -40℃~+85℃ |
| Température de stockage | -40℃~+85℃ | |
| Résistance de vibration | 2500g | |
| EMC | Selon EN61000 et GBT17626 | |
| Moyenne des temps de bon fonctionnement | ≥98000 heures/temps | |
| Résistance d'isolation | mégohm ≥100 | |
| Résistance à l'impact | 100g@11ms, direction 3 axiale (moitié Sinusoid) | |
| Antivibration | 10grms, 10~1000Hz | |
| Poids | Conseil simple : ≤25g ≤135g (câble y compris de 1 mètre) | |
![]()
![]()
![]()